
Components Of Motion Control System – An Overview
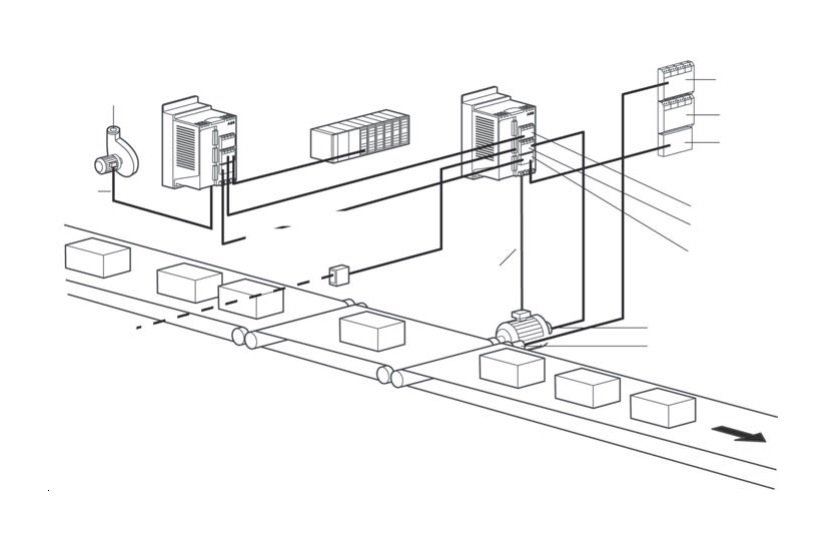
A motion control system is a complex mechanism that is used to control the movement and position of various types of machinery and equipment. It is made up of several key components that work together to ensure precise and accurate movement.
Together, these components allow for the precise control of the speed, position and direction of movement for a wide range of applications from manufacturing and robotics to aerospace and medical devices. In this article, we will explore the different components of a motion control system and how they work together to achieve precise movement.
Components Of Motion Control System
The main components of a motion control system are:
1. Human-machine interface
The HMI is used to communicate with the motion controller. The HMI may serve two main functions:
- Operating the machine controlled by the motion controller
- Programming the motion controller
Control panels with pilot lights, pushbuttons, indicators, digital readouts and analog gauges are common hardware-based HMIs to serve the purpose of operating a machine.
Control panels can also be software-based. These panels can have touch screens and embedded computers that run a graphical user interface developed using the software. The advantage of this type of panel is the ease of reconfiguration of the HMI as new features may be added to the machine in the future.
A computer is interfaced with the motion controller for programming purposes. Custom software provided by the manufacturer of the controller is used to write, edit, download and test the machine control programs. The software also includes features to test motors, monitor input/output (I/O) signals and tune controller gains.

2. Motion controller
The motion controller is the “brain” of the system. It generates motion profiles for all axes, monitors I/O and closes feedback loops. The controller generates the motion profile for an axis based on the desired motion parameters defined by the user or the programmer. While the machine is running, it receives feedback from each axis motor. If there is a difference (following error) between the generated profile and the actual position or velocity of an axis, the controller creates correction commands which are sent to the drive for that axis. The controller can also generate and manage complex motion profiles including electronic camming, linear interpolation, circular interpolation, contouring and master-slave coordination.
Motion controllers are available in different form factors. The integrated form factor incorporates the computer, the drive electronics for the axes and the machine I/O into a single unit. This unit is called a motion controller or drive. In a modular system, the computer, the drives and the machine I/O are separate units connected to each other via some communication link. In this case, just the computer is called the motion controller.

A complete motion controller consists of the following:
1. Computer
- Interpretation of user programs
- Trajectory generation
- Closing the servo loops
- Command generation for the drives (amplifiers)
- Monitoring axis limits, safety interlocks
- Handling interrupts and errors such as excessive following (position) error
2. I/O for each axis
- Motor power output
- Servo I/O for command output to amplifiers
- Input terminals for feedback signals from a motor or other external sensors
- Axis limits, homing signals and registration
3. Machine I/O
- Digital input terminals for various sensors such as operator buttons and proximity sensors
- Digital output terminals to drive external devices (usually through relays)
- Analog inputs (often optional) for analog sensors such as pressure, force
- Analog outputs (often optional) to drive analog devices
4. Communication
- Network communications with other peripheral devices, the host computer and/or the supervisory system of the plant using protocols such as DeviceNet®, Profibus®, ControlNet®, EtherNet/IP® or EtherCAT®
- USB or serial port communications
- HMI communications
3. Drives
The command signals generated by the controller are small. The drive amplifies these signals to high-power voltage and current levels necessary to operate a motor.
Therefore, the drive is also called an amplifier. The drive closes the current loop of the servo system as discussed. Therefore, it must be selected to match the type of motor to be driven. In recent trends, the line between a drive and a controller continues to blur as the drives perform many of the complex functions of a controller. They are expected to handle motor feedback and not only close the current but also the velocity and position loops.

4. Actuators
An actuator is a device that provides the energy to move a load. Motion control systems can be built using hydraulic, pneumatic or electromechanical (motor) technologies.

5. Transmission mechanisms
A transmission mechanism is used to connect the load to the motor of an axis. It helps meet the motion profile requirements. When a load is coupled to a motor through a transmission mechanism, the load inertia and torque are reflected through the mechanism to the motor.
6. Feedback
Feedback devices are used to measure the position or speed of the load. Also, the drive and the controller use feedback to determine how much current needs to be applied to each phase of the motor. The most common feedback devices are resolvers, tachometers and encoders. Encoders can be rotary or linear.
In addition, encoders can be incremental or absolute. The selection of the feedback device depends on the machine’s desired accuracy, cost and environmental conditions. A different type of feedback is provided to the controller from detection sensors such as proximity switches, limit switches or photoelectric sensors. These devices detect the presence or absence of an object. For example, a photoelectric sensor may detect the arrival of a product on a conveyor and signal the motion controller to start running the conveyor.

 Types of Timer Relays and Their Applications
Types of Timer Relays and Their Applications  Relay Applications: Real-Life And Industrial Examples
Relay Applications: Real-Life And Industrial Examples  Types of Micro Switches and Their Applications
Types of Micro Switches and Their Applications  Best Voltage Testers for Home Use: 2023 Edition
Best Voltage Testers for Home Use: 2023 Edition  Advantages of Transducers for Optimal Measurement
Advantages of Transducers for Optimal Measurement  Advantages of Infrared Sensors: Improved Accuracy and More
Advantages of Infrared Sensors: Improved Accuracy and More